









Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:100
Beschrijving
De eerste stap in roboticaprojecten is het laten draaien van een motor. Niet alle motoren werken echter met dezelfde snelheid, zelfs niet met identieke onderdeelnummers, vanwege variaties in spanning, omgeving en productie. De volgende cruciale stap is het bepalen van de snelheid van de motor, een uitdagende taak die wordt vereenvoudigd door het toevoegen van een encoderwiel en een optische of magnetische teller. Terwijl de motor draait, draait het encoderwiel, waardoor de teller elke spaak kan detecteren en snelheidsberekeningen mogelijk maakt. Verbeter de functionaliteit door een tweede teller toe te voegen om de richting te bepalen.
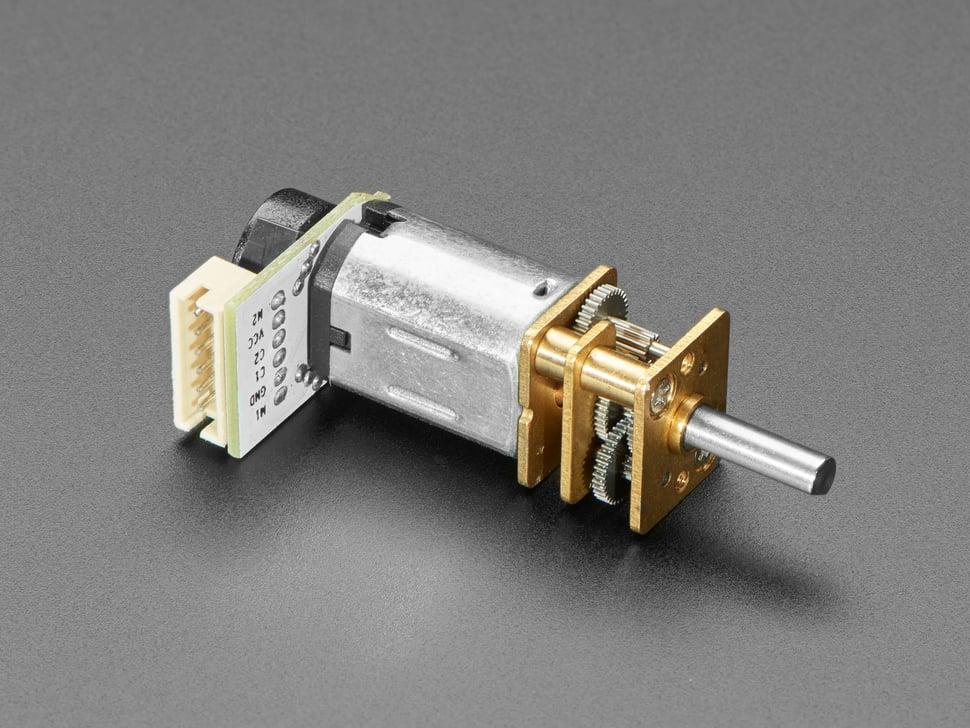
Deze motor stroomlijnt het proces met een geïntegreerd magnetisch wiel en twee Hall-effectsensoren. Als compacte N20-motor werkt hij soepel met 4,5 tot 6 V DC-voeding. Sluit de witte en rode draden aan op uw motor driver voor snelheidsregeling en richtingsregeling met PWM en een H-brug. De blauwe draad wordt aangesloten op ground van uw microcontroller, terwijl de zwarte draad geschikt is voor elke 3-5 V DC-bron. Hall- outputs zijn toegankelijk via de gele en green draden.
Er is een Arduino voorbeeldschets beschikbaar, maar deze kan worden aangepast voor andere programmeertalen. Het omvat het onderbreken van een van de encoderpinnen, het tellen van de tijd sinds de laatste onderbreking en het vermenigvuldigen van de teltijd met 14 tellingen per omwenteling en de gear ratio . Deze motor heeft een gear ratio van 1:100, verbruikt 6 V nominaal vermogen en verbruikt ongeveer 100 mA (200 mA bij stilstand). De gear ratio heeft invloed op het koppel en het toerental, maar niet op het stroomverbruik.
Eigenschappen
| Merk | Adafruit |
| Model | 4639 |
Levertijd 10 tot 12 werkdagen
 Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:100 Geleverd in 10 tot 12 dagen € 19,50
Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:100 Geleverd in 10 tot 12 dagen € 19,50 Vragen en antwoorden
Klant ervaringen
Meer van het merk Adafruit
- Afgeprijsd Op voorraad -50 % Adafruit NOODs - Flexibel LED Filament - 3V - 300mm - Rood € 10,55 € 5,30 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit Feather Stacking Headers - 12-pins en 16-pins female headers € 1,75 € 0,90 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit SCD-41 - Echte CO2-temperatuur- en vochtigheidssensor € 70,05 € 35,05 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit NOODs - Flexibele LED Filament - 3V - 300mm - Geel € 10,55 € 5,30 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit Mini metalen luidspreker met draden - 8 ohm 0,5W € 2,75 € 1,40 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit Aansluitdraadhaspelset - 22AWG Stranded-Core - 6 x 7,5ft € 28,- € 14,- Bekijk product
- Afgeprijsd Op voorraad -51 % Adafruit Waterdichte gepolariseerde 4-aderige kabelset € 3,55 € 1,75 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit Solderloze Press-Fit Mannelijke Pin Header - 2,54mm / 0,1" Pitch € 2,70 € 1,35 Bekijk product
- Afgeprijsd 10 stuks Op voorraad -50 % Adafruit Break-away 0,1 "36-pins strip male header - zwart - 10 pak € 6,95 € 3,50 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit IR Break Beam Sensor - 3 mm LED's € 4,15 € 2,10 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit Witte LED-achtergrondverlichtingsmodule - Groot 45 mm x 86 mm € 4,15 € 2,10 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit 75mm Speaker - 4 Ohm 3 Watt € 2,75 € 1,40 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit Luidspreker - diameter 40 mm - 4 ohm 3 watt € 6,95 € 3,50 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit Electret-microfoonversterker - MAX4466 met instelbare versterking € 9,75 € 4,90 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit Mini basis PIR-sensor - BL412 € 2,75 € 1,40 Bekijk product
Laatst bekeken
- Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:100 € 19,50 Bekijk product
- Adafruit Small 1.2" 8x8 LED Matrix met I2C Rugzak - Geel € 17,- Bekijk product
- Adafruit Mini PiTFT 1.3" - 240x240 TFT-uitbreiding voor Raspberry Pi € 22,75 Bekijk product
- Adafruit Flexibele siliconen neon-achtige LED-strip - 1 meter - paars € 21,50 Bekijk product
- Adafruit Regelbare voeding met 2,1 mm / 5,5 mm DC - 3 V tot 24 V bij 2 Ampère € 26,- Bekijk product
- Adafruit Ultra flexibele witte LED-strip - 480 LED's per meter - 5 m lang € 68,75 Bekijk product
- Adafruit NeoPixel LED-feeërieke verlichting met vast adres - 100 bedrade LED's € 49,- Bekijk product
- Adafruit Alpha Dual- gang 16mm haakse PC-montage - 250K audio € 6,50 Bekijk product
- Adafruit Nummer LED Gloeidraad - Warm Wit "9" € 7,- Bekijk product