









Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:298
Beschrijving
De eerste stap in een roboticaproject is het laten draaien van een motor. Niet alle motoren draaien even snel vanwege variaties in spanning, omgeving en productie. Het bepalen van de motorsnelheid gebeurt met behulp van een encoderwiel met een optische of magnetische teller om het aantal rotaties te tellen.
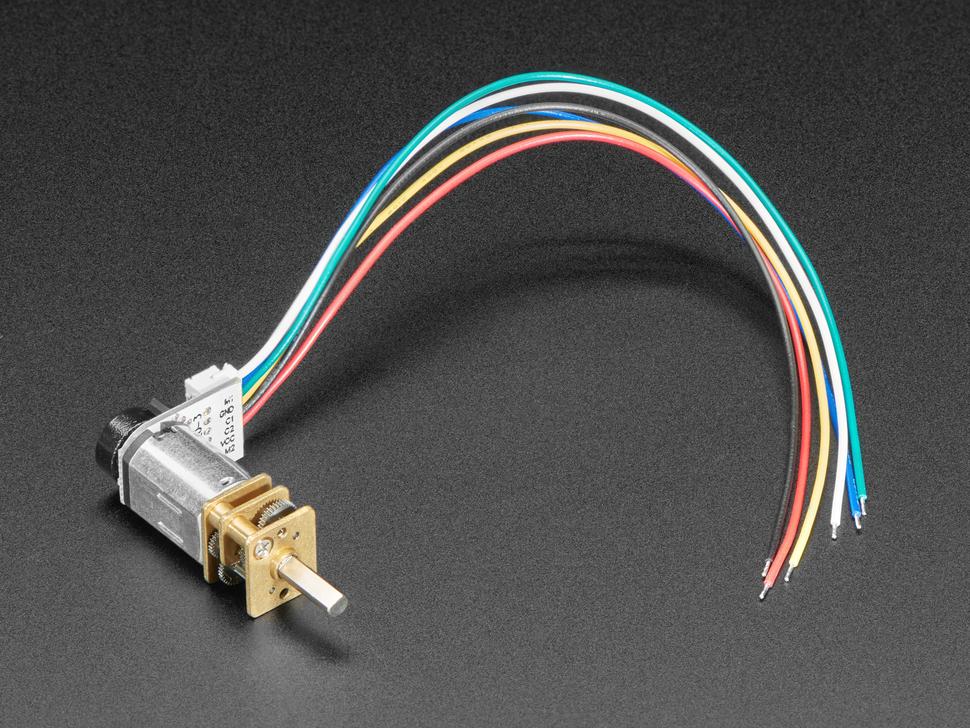
Deze motor vereenvoudigt het proces met een bevestigd magnetisch wiel en twee Hall-effectsensoren, waardoor complexe bedrading overbodig is. Hij is compact, past in de standaard N20-maat en werkt efficiënt met 4,5 tot 6 V DC. De aansluitingen zijn eenvoudig: witte en rode draden voor motoraandrijving, PWM-ondersteuning voor snelheidsregeling, blauwe draad voor ground en zwarte draad voor voeding. De gele en green draden leveren outputs .
Er is een Arduino voorbeeldschets beschikbaar, aanpasbaar aan andere talen, voor interrupttelling en snelheidsberekening met een gear ratio van 1:298. De motor verbruikt een nominaal vermogen van 6 V en trekt ongeveer 100 mA (200 mA bij stilstand). Het variëren van de gear ratio heeft invloed op het koppel en toerental, niet op het stroomverbruik.
Eigenschappen
| Merk | Adafruit |
| Model | 4641 |
Levertijd 10 tot 12 werkdagen
 Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:298 Geleverd in 10 tot 12 dagen € 19,50
Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:298 Geleverd in 10 tot 12 dagen € 19,50 Vragen en antwoorden
Klant ervaringen
Meer van het merk Adafruit
- Afgeprijsd Op voorraad -50 % Adafruit NOODs - Flexibel LED Filament - 3V - 300mm - Rood € 10,55 € 5,30 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit Feather Stacking Headers - 12-pins en 16-pins female headers € 1,75 € 0,90 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit SCD-41 - Echte CO2-temperatuur- en vochtigheidssensor € 70,05 € 35,05 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit NOODs - Flexibele LED Filament - 3V - 300mm - Geel € 10,55 € 5,30 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit Mini metalen luidspreker met draden - 8 ohm 0,5W € 2,75 € 1,40 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit Aansluitdraadhaspelset - 22AWG Stranded-Core - 6 x 7,5ft € 28,- € 14,- Bekijk product
- Afgeprijsd Op voorraad -51 % Adafruit Waterdichte gepolariseerde 4-aderige kabelset € 3,55 € 1,75 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit Solderloze Press-Fit Mannelijke Pin Header - 2,54mm / 0,1" Pitch € 2,70 € 1,35 Bekijk product
- Afgeprijsd 10 stuks Op voorraad -50 % Adafruit Break-away 0,1 "36-pins strip male header - zwart - 10 pak € 6,95 € 3,50 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit IR Break Beam Sensor - 3 mm LED's € 4,15 € 2,10 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit Witte LED-achtergrondverlichtingsmodule - Groot 45 mm x 86 mm € 4,15 € 2,10 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit 75mm Speaker - 4 Ohm 3 Watt € 2,75 € 1,40 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit Luidspreker - diameter 40 mm - 4 ohm 3 watt € 6,95 € 3,50 Bekijk product
- Afgeprijsd Op voorraad -50 % Adafruit Electret-microfoonversterker - MAX4466 met instelbare versterking € 9,75 € 4,90 Bekijk product
- Afgeprijsd Op voorraad -49 % Adafruit Mini basis PIR-sensor - BL412 € 2,75 € 1,40 Bekijk product
Laatst bekeken
- Adafruit N20 DC motor met magnetische encoder - 6V met gear ratio van 1:298 € 19,50 Bekijk product
- Adafruit 13,56 MHz RFID/NFC-kaart - Classic 1K € 6,50 Bekijk product
- Adafruit Kleine 1,2" 8x8 ultra heldere witte LED-matrix + rugzak € 20,75 Bekijk product
- Adafruit 75mm staven - 12V digitale RGB LED-pixels (streng van 21) € 68,75 Bekijk product
- Adafruit Oranje en helder TT-motorwiel voor TT DC- gearbox € 5,- Bekijk product
- Adafruit Thermokoppel Type-K Glasvlecht Geïsoleerd - 5m € 36,- Bekijk product
- Adafruit 13,56 MHz RFID/NFC-kaart - NTAG213-chip € 7,- Bekijk product
- Adafruit NeoPixel Slim LED Dot Strand - 20 LED's met een onderlinge afstand van 2 inch € 16,25 Bekijk product
- Adafruit Raspberry Pi Pico RP2040 met losse, ongesoldeerde headers € 9,75 Bekijk product
- Adafruit EYESPI-kabel - 18-pins 50 mm lange Flex PCB (FPC) AB-type € 4,- Bekijk product
- Adafruit Doorzichtige turbinewaterstroomsensor met 3-pins JST € 11,75 Bekijk product
- Adafruit Premium kleurrijke siliconen verlengsnoeren - 200mm x 30 stuks € 16,25 Bekijk product
- Adafruit 3,52" 340x180 Vierkleurige eInk / ePaper - Kale Display € 29,25 Bekijk product
- Adafruit USB Type C PD naar 5,5mm/2,1mm Barrel Jack Adapter - 20V € 6,- Bekijk product
- Adafruit Nummer LED Filament - Warm Wit "2" € 7,- Bekijk product